Projekt #6 - R betű kirakása robottal
Projektfeladat leírása
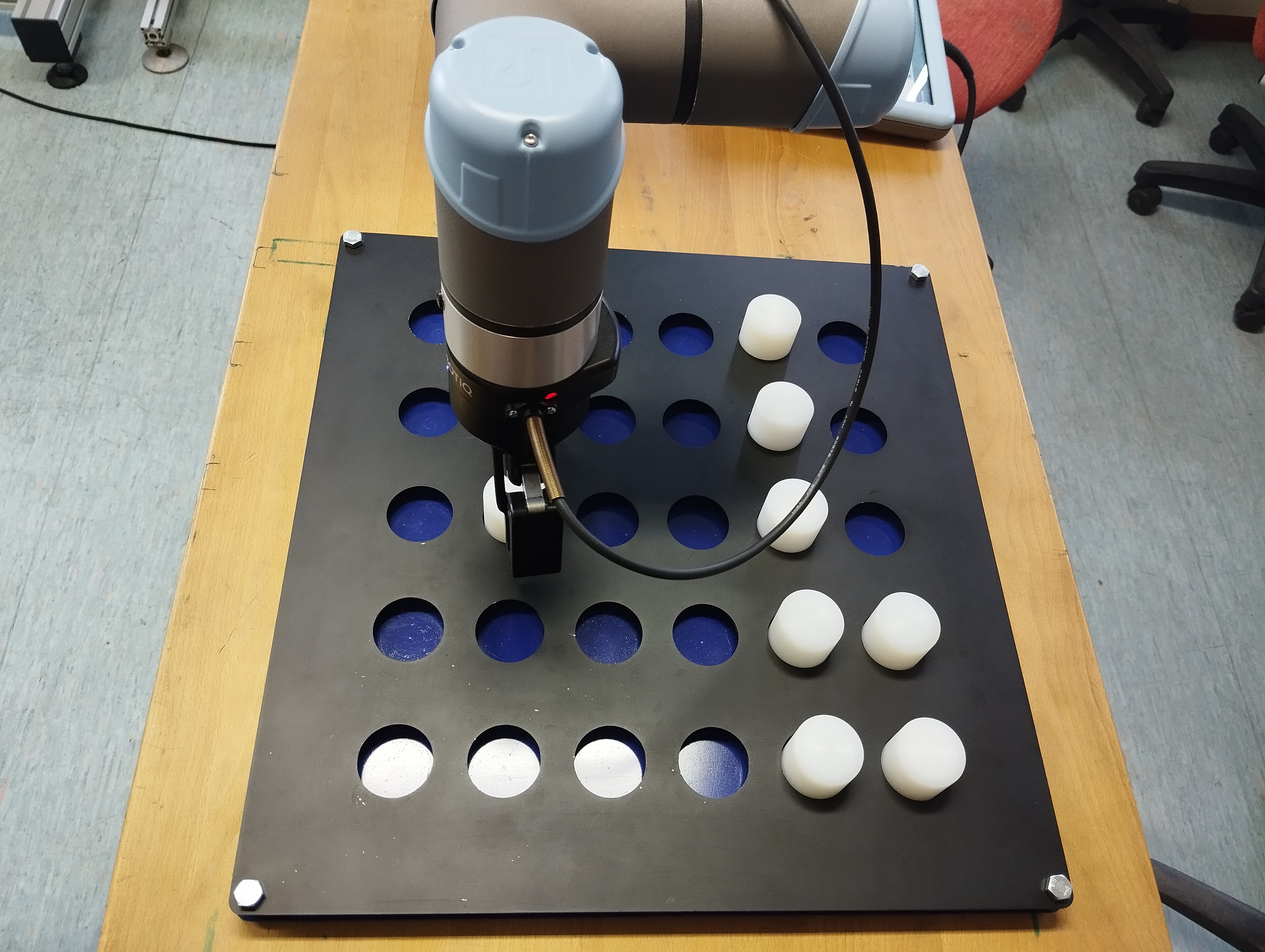
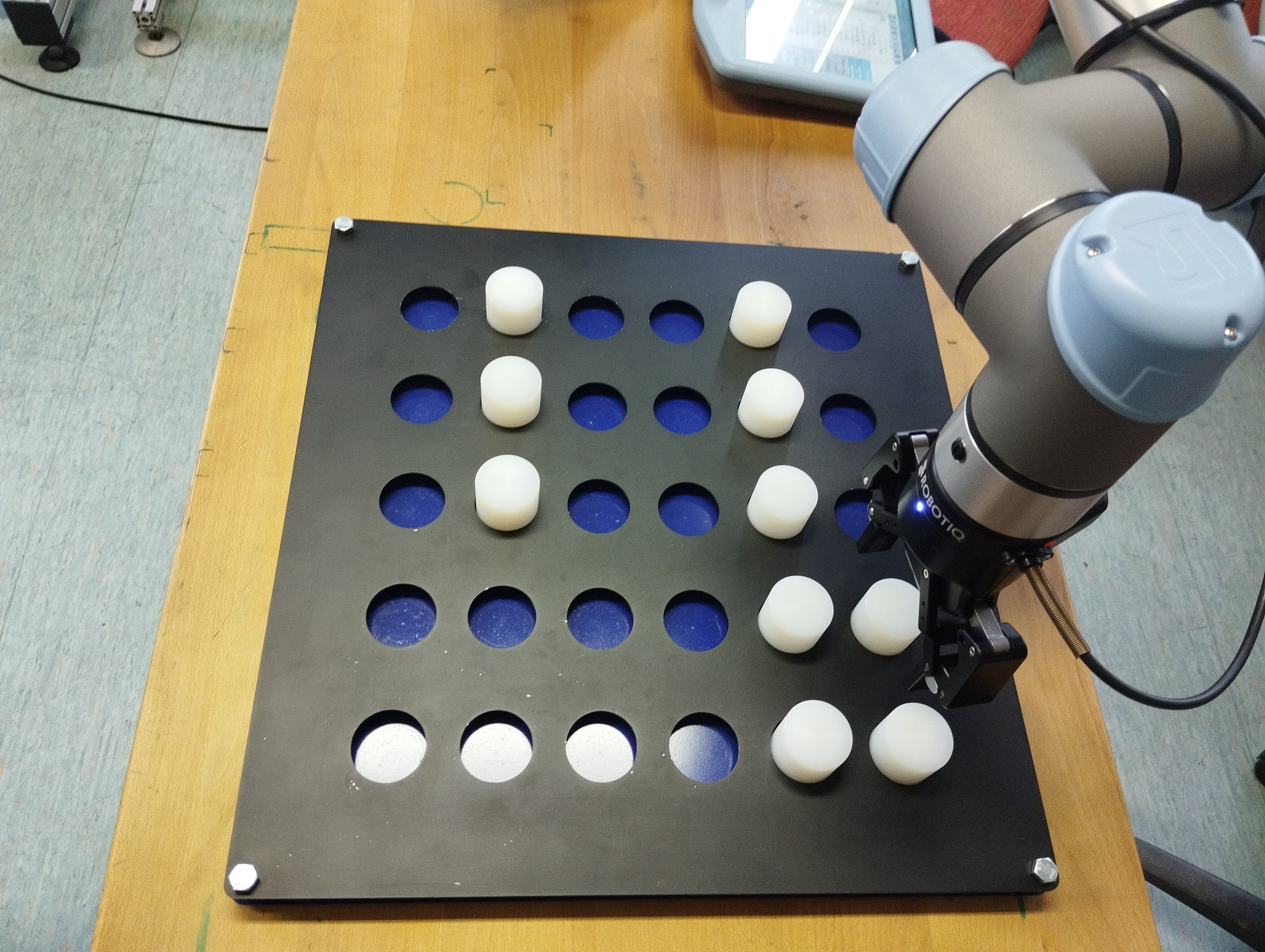
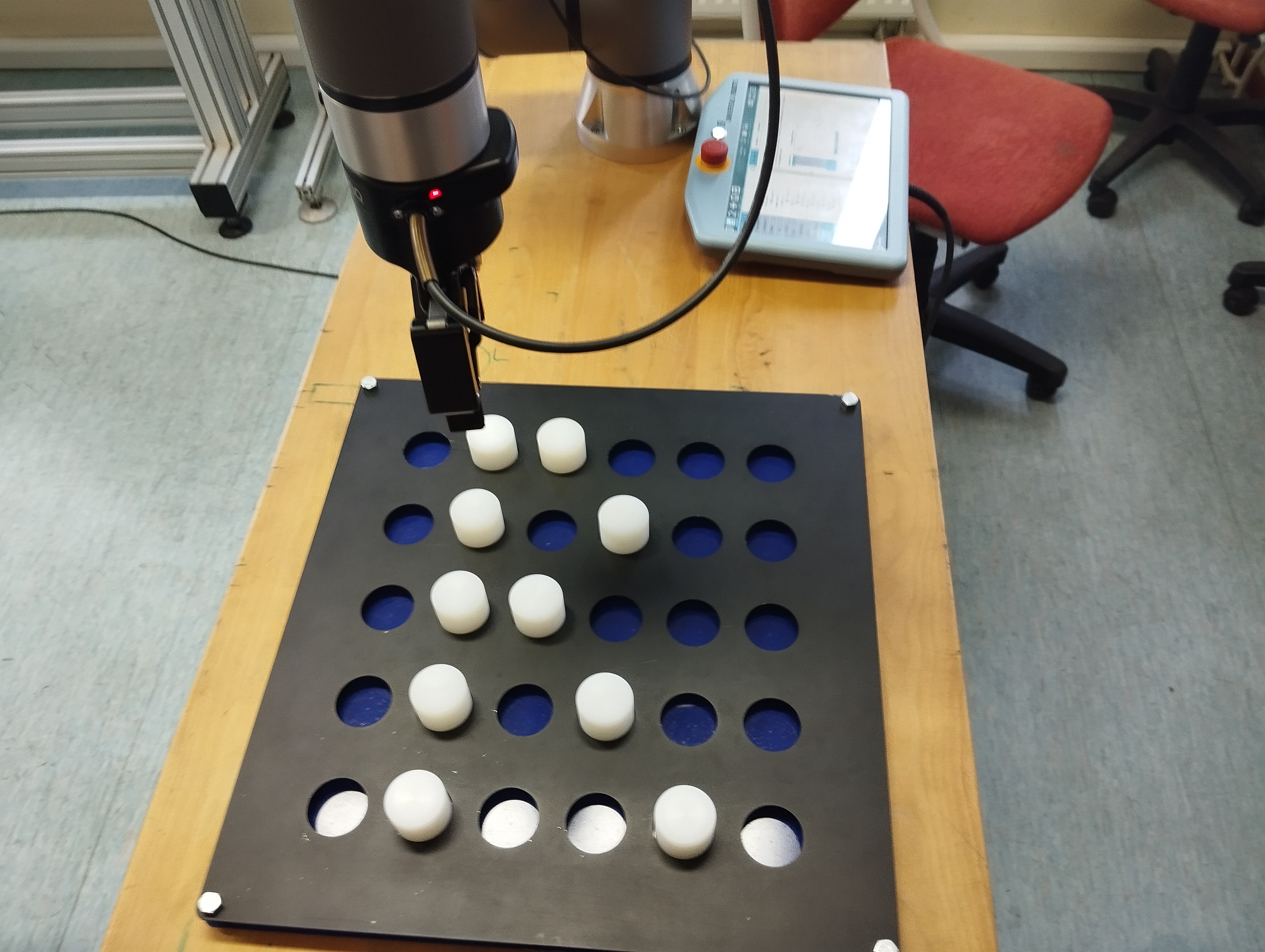
A projekt során egy ipari robotkar programozását végeztük el HMI (Human Machine Interface) segítségével. A rendszer célja az volt, hogy a robot egy táblán elhelyezkedő hengereket (fehér elemeket) mozgasson és egy meghatározott mintát hozzon létre.
A feladat egy perforált táblán zajlott, ahol a robot a hengereket különböző pozíciókba helyezte át. A robot működését egy érintőképernyős vezérlőfelületen keresztül lehetett programozni és irányítani.
Az én konkrét feladatom az volt, hogy a robot segítségével a hengerekből az „R” betű alakját hozzam létre. Ehhez meg kellett határozni a megfelelő pozíciókat, valamint a robot mozgási sorrendjét, hogy a robot minden elemet pontosan a kívánt helyre helyezzen.
A projekt során megismerkedtünk az ipari robotok alapvető vezérlésével, a robotpozíciók meghatározásával, valamint a robotkar biztonságos működtetésével.
A projektben használt hardveres eszközök
● Ipari robotkar ●
● HMI érintőképernyős vezérlőpanel ●
● Perforált munkafelület ●
● Henger alakú manipulációs elemek ●
A projektben használt szoftveres eszközök
● HMI alapú robotvezérlő felület ●
● Robot programozó környezet ●
Konklúzió és Önreflexió
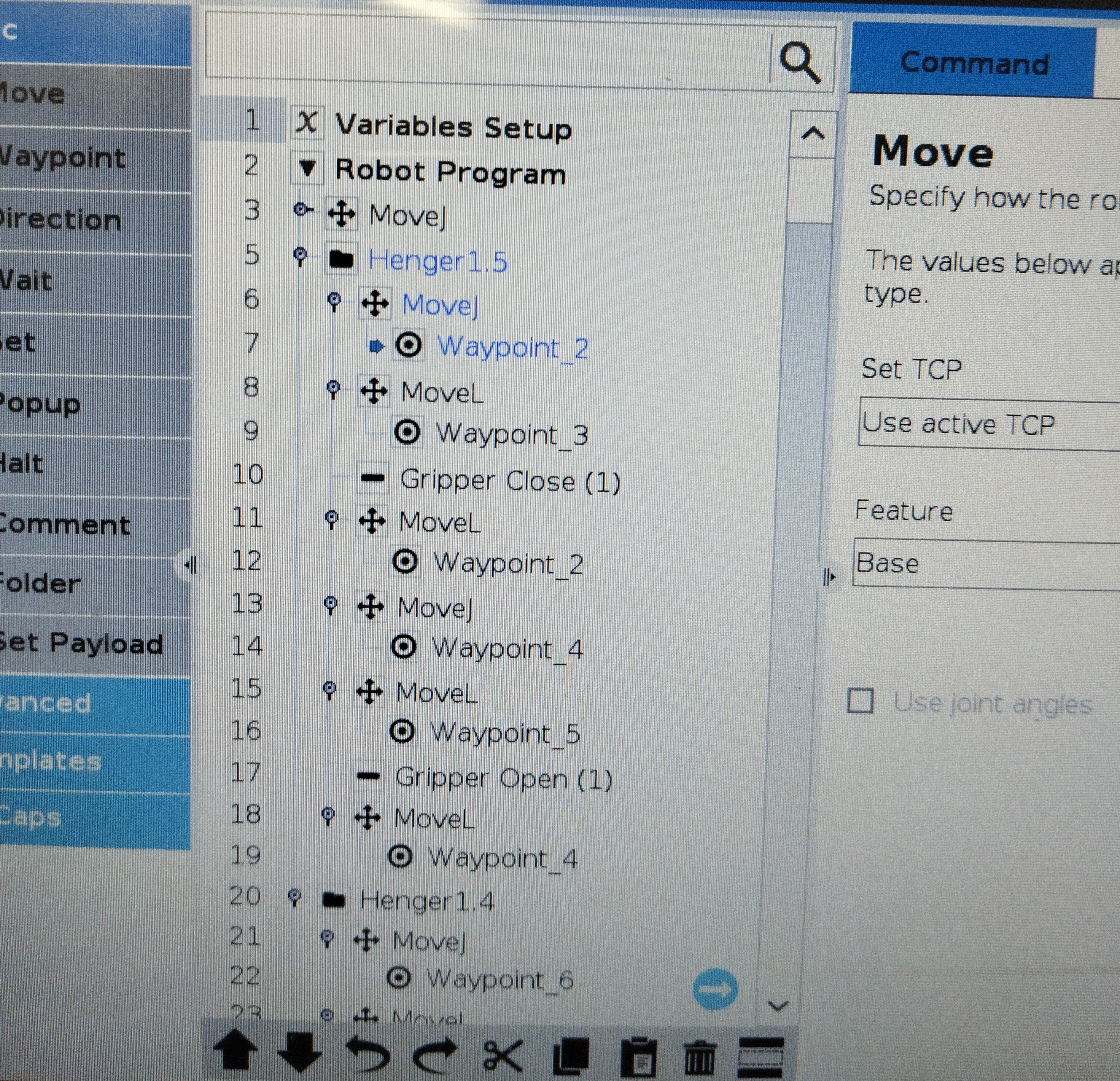
A projekt során megismerkedtem egy ipari robot programozásának alapjaival, valamint a pick and place típusú feladatok megvalósításával. A feladat során a robotkar segítségével különböző hengereket kellett áthelyezni egy perforált táblán meghatározott pozíciókba. A programozást a robot vezérlőfelületén keresztül végeztük, ahol különböző mozgásparancsokat és waypointokat kellett megadni. A projekt során megtanultam a robot mozgásának pontos meghatározását, valamint a MoveL és MoveJ mozgástípusok használatát. Fontos tapasztalat volt számomra a robotok biztonságos működtetéséhez szükséges munkavédelmi szabályok betartása is, mivel a berendezés 230 V feszültséggel működik.
A program felépítését igyekeztem logikusan és átlátható módon kialakítani, mappákba rendezve a különböző műveleteket. Erősségemnek tartom, hogy a program szerkezetét rendszerezetten építettem fel, így a későbbi módosítások és hibakeresés is könnyebb volt. A projekt során a robotprogram futtatása megfelelően működött, és a robot a kívánt műveleteket végre tudta hajtani. Ugyanakkor fejlődnöm kell a program optimalizálásában, például a waypointok újrafelhasználásában, mivel több esetben feleslegesen hoztam létre új pozíciókat. Összességében a projekt hozzájárult ahhoz, hogy jobban megértsem az ipari robotok működését és a robotprogramozás alapelveit.
Képek és Videók